
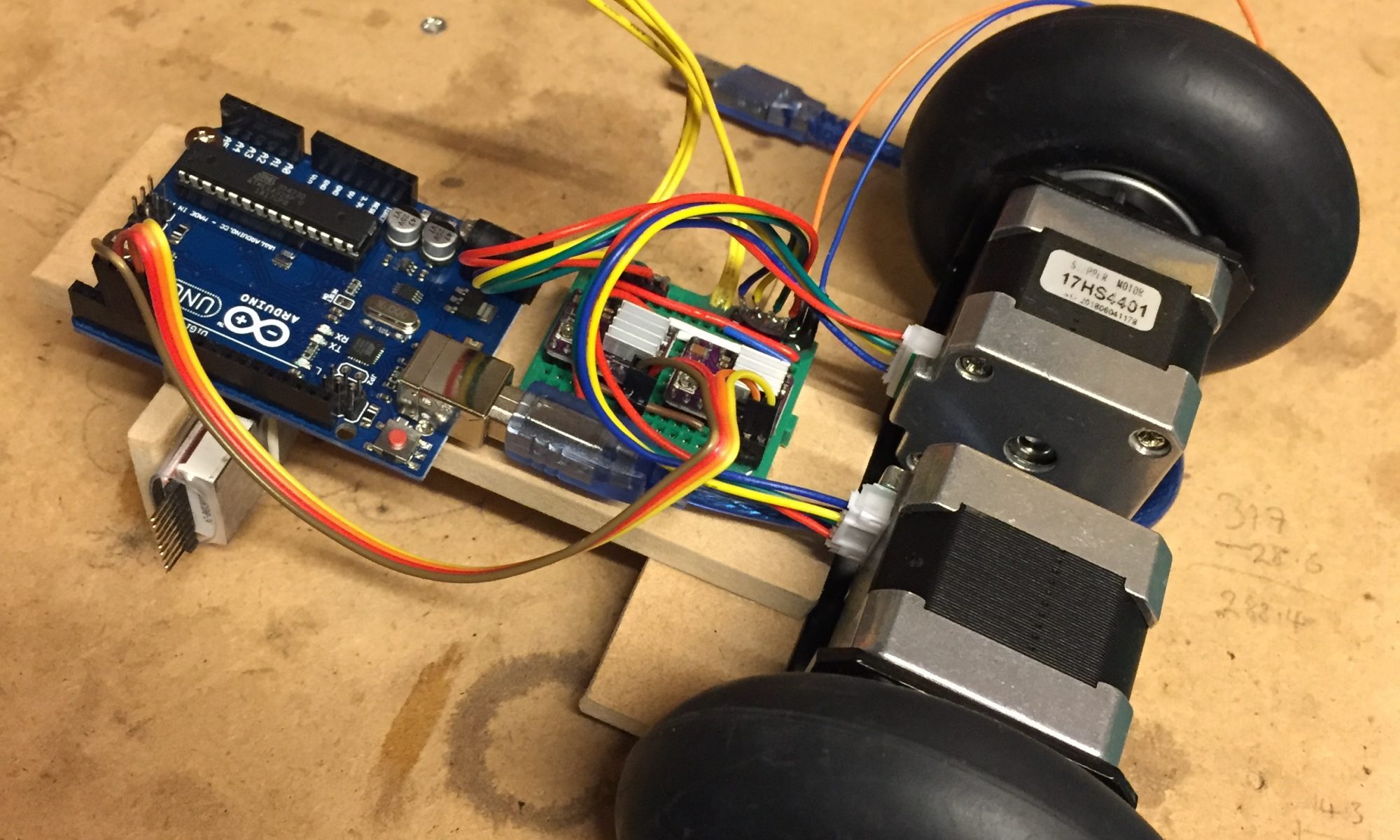
So I decided to practise some of my recently-acquired Arduino skillz to try and make a self-balancing robot.
The idea of a robot managing to monitor and update itself so fast it can actually balance really intrigues me. I wanted to see whether I could do it (without too much help from the Internet), and how well it would balance. I had some spare MDF lying around, so got to work…
Continue reading “Self-balancing Robot”